Classes | |
| struct | Context |
| struct | ImmediateCmd |
Public Types | |
| typedef std::shared_ptr< MGrblPlatform > | Shared |
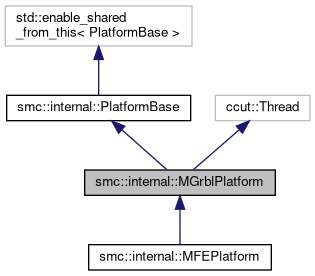
 Public Types inherited from smc::internal::PlatformBase Public Types inherited from smc::internal::PlatformBase | |
| typedef std::shared_ptr< PlatformBase > | Shared |
| typedef std::set< DeviceBase::DeviceType > | DeviceTypeList |
| typedef std::list< DeviceBase::Shared > | DeviceList |
Public Member Functions | |
| std::shared_ptr< MGrblPlatform > | shared_from_this () |
| std::shared_ptr< const MGrblPlatform > | shared_from_this () const |
| DeviceTypeList | getSupportedDevices () const override |
| DeviceList | generateDevices (const DeviceTypeList &deviceType) override |
| void | setNotificationWorker (const NotificationWorker::Shared &worker) override |
| std::future< mgrbl::Layout > | getLayout () |
| retrieve current layout | |
| void | stop () override |
| void | wake () override |
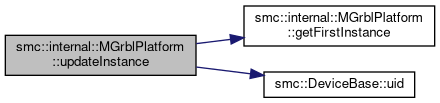
| void | updateInstance (MGrblGpio &gpio) const |
| update instance ptr related to the given gpio More... | |
| void | updateInstance (MGrblAxis &axis) const |
| update instance ptr related to the given axis More... | |
| void | updateInstance (MGrblTrigger &trigger) const |
| update instance ptr related to the given trigger More... | |
| const std::string & | mainTriggerUrl () const |
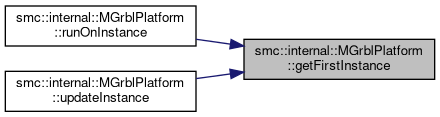
| std::shared_ptr< GrblPlatform > | getFirstInstance () const |
| return first instance More... | |
| std::shared_ptr< GrblPlatform > | getInstance (mgrbl::Instance instance) const |
| get instance related to the given axis More... | |
| void | runOnInstance (Context &ctx, std::function< void(GrblPlatform::Shared &platform, GrblPlatform::Context &ctx)> fun, bool onlyFirst=false) const |
| run the given lambda on all grbl sub-platforms More... | |
| template<typename T > | |
| std::future< T > | run (std::function< void(ImmediateCmd &, Context &)> fun) |
| void | loadLayout (Context &ctx) |
| void | getBuildInfo (Context &ctx) |
| Public Member Functions inherited from smc::internal::PlatformBase | |
| void | notify (const DeviceId &id) |
| void | notify (std::set< DeviceId > &&ids) |
Static Public Member Functions | |
| static PlatformBase::Shared | create (const ccut::yml::NodeRef &config) |
| Create new instance of MGrblPlatform and return shared_ptr owning it. | |
Protected Member Functions | |
| MGrblPlatform (const ccut::yml::NodeRef &node, Context *data=nullptr) | |
| internal constructor to use this as a sub-platform (MGrblPlatform) More... | |
| void | processMessage (const std::string &message) |
| virtual MGrblAxis::Shared | createAxis (const std::string &uid, const std::shared_ptr< GrblPlatform > &grbl) |
| void | thread_func () override |
| virtual void | processUpdate (Context &ctx) |
| device status update function More... | |
| bool | processImmediate (Context &ctx) |
| void | createPlatforms (Context &ctx) |
| void | clearQueue (const std::string &msg) |
| std::vector< std::shared_ptr< GrblPlatform > > | getPlatforms () const |
Protected Attributes | |
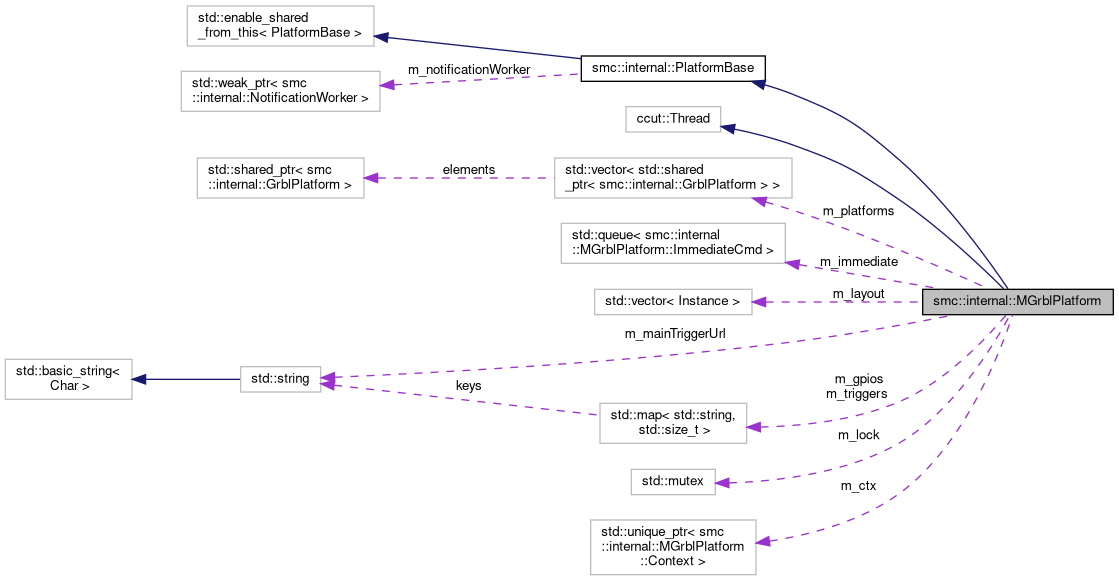
| std::unique_ptr< Context > | m_ctx |
| std::mutex | m_lock |
| std::vector< std::shared_ptr< GrblPlatform > > | m_platforms |
| std::map< std::string, std::size_t > | m_triggers |
| std::map< std::string, std::size_t > | m_gpios |
| const std::string | m_mainTriggerUrl |
| mgrbl::Layout | m_layout |
| ccut::Connection | m_dataConn |
| std::queue< ImmediateCmd > | m_immediate |
| Protected Attributes inherited from smc::internal::PlatformBase | |
| std::weak_ptr< NotificationWorker > | m_notificationWorker |
Detailed Description
Definition at line 53 of file MGrblPlatform.hpp.
Constructor & Destructor Documentation
◆ MGrblPlatform()
|
explicitprotected |
internal constructor to use this as a sub-platform (MGrblPlatform)
- Parameters
-
prefix the platform uri prefix to use data the internal data pointer node the yaml configuration
Definition at line 52 of file MGrblPlatform.cpp.

Member Function Documentation
◆ getFirstInstance()
| GrblPlatform::Shared smc::internal::MGrblPlatform::getFirstInstance | ( | ) | const |
return first instance
used to run ImmediateCmd on controller
- Exceptions
-
Exception (returned instance is always valid)
Definition at line 114 of file MGrblPlatform.cpp.
◆ getInstance()
|
inline |
get instance related to the given axis
- Exceptions
-
Exception (returned instance is always valid)
Definition at line 132 of file MGrblPlatform.hpp.
◆ processUpdate()
|
protectedvirtual |
device status update function
updates device information must be called from processing thread
Reimplemented in smc::internal::MFEPlatform.
Definition at line 365 of file MGrblPlatform.cpp.
◆ runOnInstance()
| void smc::internal::MGrblPlatform::runOnInstance | ( | Context & | ctx, |
| std::function< void(GrblPlatform::Shared &platform, GrblPlatform::Context &ctx)> | fun, | ||
| bool | onlyFirst = false |
||
| ) | const |
run the given lambda on all grbl sub-platforms
- Parameters
-
ctx used to enforce this method to be called from thread context fun lambda to execute
Definition at line 183 of file MGrblPlatform.cpp.

◆ updateInstance() [1/3]
| void smc::internal::MGrblPlatform::updateInstance | ( | MGrblAxis & | axis | ) | const |
update instance ptr related to the given axis
- Exceptions
-
Exception on unknown object
Definition at line 124 of file MGrblPlatform.cpp.
◆ updateInstance() [2/3]
| void smc::internal::MGrblPlatform::updateInstance | ( | MGrblGpio & | gpio | ) | const |
update instance ptr related to the given gpio
- Exceptions
-
Exception on unknown object
Definition at line 162 of file MGrblPlatform.cpp.

◆ updateInstance() [3/3]
| void smc::internal::MGrblPlatform::updateInstance | ( | MGrblTrigger & | trigger | ) | const |
update instance ptr related to the given trigger
- Exceptions
-
Exception on unknown object
Definition at line 142 of file MGrblPlatform.cpp.

The documentation for this class was generated from the following files:
- /builds/mro/controls/sambuca/sambuca-motion-lib/src/platform/specialized/MGrblPlatform/MGrblPlatform.hpp
- /builds/mro/controls/sambuca/sambuca-motion-lib/src/platform/specialized/MGrblPlatform/MGrblPlatform.cpp
- /builds/mro/controls/sambuca/sambuca-motion-lib/src/platform/specialized/MGrblPlatform/MGrblPlatform_Base.cpp
- /builds/mro/controls/sambuca/sambuca-motion-lib/src/platform/specialized/MGrblPlatform/MGrblPlatformData.hpp