Public Types | |
| typedef std::shared_ptr< MFEPositionSensor > | Shared |
 Public Types inherited from smc::PositionSensor Public Types inherited from smc::PositionSensor | |
| typedef std::shared_ptr< PositionSensor > | Shared |
| Public Types inherited from smc::DeviceBase | |
| typedef smc::DeviceType | DeviceType |
| typedef std::shared_ptr< DeviceBase > | Shared |
Public Member Functions | |
| MFEPositionSensor (const std::string &uid, const std::shared_ptr< MFEPlatform > &mfe) | |
| std::future< units::value_t > | getPosition (units::unit_t unit) const override |
| Get current position value. More... | |
| std::future< void > | setActualPosition (const units::value_t &value) const override |
| Set the current position value. More... | |
| units::value_t | lastPosition (units::unit_t unit) const override |
| Get last known position. More... | |
| std::future< std::set< std::string > > | listConfig () const override |
| list device configuration options | |
| std::future< std::string > | getConfig (const std::string &name) const override |
| get device configuration value More... | |
| std::future< void > | setConfig (const std::string &name, const std::string &value) const override |
| set device configuration value More... | |
| bool | canConvert (const units::Value &value, units::unit_t unit) const override |
| Check if unit conversion is possible in a manner specific to this device. More... | |
| bool | convert (units::Value &value, units::unit_t unit) const override |
| Convert value in a manner specific to this device. More... | |
| Public Member Functions inherited from smc::PositionSensor | |
| PositionSensor (const std::string &address) | |
| Construct a new POSITION Device at given location on given platform. More... | |
| DeviceType | type () const override |
| Get device type. More... | |
| Public Member Functions inherited from smc::DeviceBase | |
| DeviceId | uid () const |
| Get the address of device. More... | |
| std::string | toString () const |
| debug and logging operation | |
Protected Attributes | |
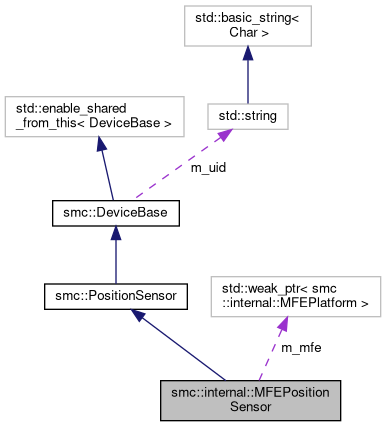
| std::weak_ptr< MFEPlatform > | m_mfe |
| Protected Attributes inherited from smc::DeviceBase | |
| const std::string | m_uid |
Additional Inherited Members | |
| Public Attributes inherited from smc::DeviceBase | |
| ccut::Signal< const DeviceBase::Shared & > | updateSignal |
| device update signal More... | |
| Protected Member Functions inherited from smc::DeviceBase | |
| DeviceBase (const std::string &uid) | |
| Construct a new ABaseDevice, linking pointer to platform object. More... | |
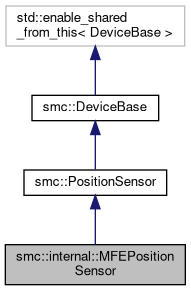
Detailed Description
Definition at line 37 of file MFEPositionSensor.hpp.
Member Function Documentation
◆ canConvert()
|
overridevirtual |
Check if unit conversion is possible in a manner specific to this device.
- Parameters
-
value Value to check unit Unit to check
- Returns
- true If conversion is possible
- false If conversion is not possible
Reimplemented from smc::DeviceBase.
Definition at line 253 of file MFEPositionSensor.cpp.

◆ convert()
|
overridevirtual |
Convert value in a manner specific to this device.
- Parameters
-
value Value to convert unit Unit to convert to
- Returns
- true If conversion was successful
- false If conversion is not possible
Reimplemented from smc::DeviceBase.
Definition at line 263 of file MFEPositionSensor.cpp.

◆ getConfig()
|
overridevirtual |
get device configuration value
- Parameters
-
name value to retrieve
- Returns
- the current value (yml encoded)
Reimplemented from smc::DeviceBase.
Definition at line 174 of file MFEPositionSensor.cpp.
◆ getPosition()
|
overridevirtual |
Get current position value.
- Parameters
-
unit unit to get position in
- Returns
- future<mm> Future completed with value when command executed.
Implements smc::PositionSensor.
Definition at line 45 of file MFEPositionSensor.cpp.
◆ lastPosition()
|
overridevirtual |
Get last known position.
- Parameters
-
unit unit to get position in
- Returns
- units::value_t
Implements smc::PositionSensor.
Definition at line 124 of file MFEPositionSensor.cpp.
◆ setActualPosition()
|
overridevirtual |
Set the current position value.
- Parameters
-
value value to set
Reimplemented from smc::PositionSensor.
Definition at line 101 of file MFEPositionSensor.cpp.
◆ setConfig()
|
overridevirtual |
set device configuration value
- Parameters
-
name name of the configuration value to set value value to set
Reimplemented from smc::DeviceBase.
Definition at line 214 of file MFEPositionSensor.cpp.
The documentation for this class was generated from the following files:
- /builds/mro/controls/sambuca/sambuca-motion-lib/src/platform/specialized/MFEPlatform/MFEPositionSensor.hpp
- /builds/mro/controls/sambuca/sambuca-motion-lib/src/platform/specialized/MFEPlatform/MFEPositionSensor.cpp